 Fraunhofer-Institut für Großstrukturen in der Produktionstechnik IGP
Fraunhofer-Institut für Großstrukturen in der Produktionstechnik IGPDie Fraunhofer Forschungsgruppe „Smart Ocean Technology“ (SOT) sitzt seit dem Sommer 2020 im zukünftigen „Ocean Technology Campus“ (OTC) am Fischereihafen in Rostock. Bisher sind 16 wissenschaftliche Mitarbeiter:innen aus verschiedenen Forschungsbereichen aus den beteiligten Fraunhofer-Instituten dort beschäftigt. Einige Firmen, wie z.B. Kraken Power GmbH und Framework Robotics GmbH, haben sich auch in dieser kurzen Zeit dort angesiedelt. Zudem existiert ein direkter Zugang zur Warnow über die Marina „Bramow“ mit stellenweise bis zu 6 m tiefem Grund. Außerdem gibt es die Möglichkeit Stromanschlüsse, die sonst für Boote zur Verfügung stehen, die Slipanlagen und den Kran an der Kaikante mit zu nutzen.


Ziel dieses Infrastrukturprojektes „MiniLab“ ist es, eine modulare Testumgebung in Form einer sensorbestückten Halterstruktur, in die verschiedene Applikationsprojekte integriert werden können, zu entwickeln und umzusetzen, die dann Fraunhofermitarbeiter:innen, externen Projektpartner:innen und auch potentiellen Kund:innnen als Werkzeug für Unterwassereinsätze in offenen Gewässern zur Verfügung steht. Diese Halterstruktur soll vor allem für kurzfristige Tests, wie z.B. Sensorkalibrierung, kurzfristige Messungen in der Wassersäule oder am Grund, zur Verfügung stehen und ohne großen logistischen Aufwand in kurzer Zeit zum Einsatz kommen. Für die Anwendungsfälle werden standardisierte Haltervorrichtungen bzw. Tischkonstruktionen integriert.
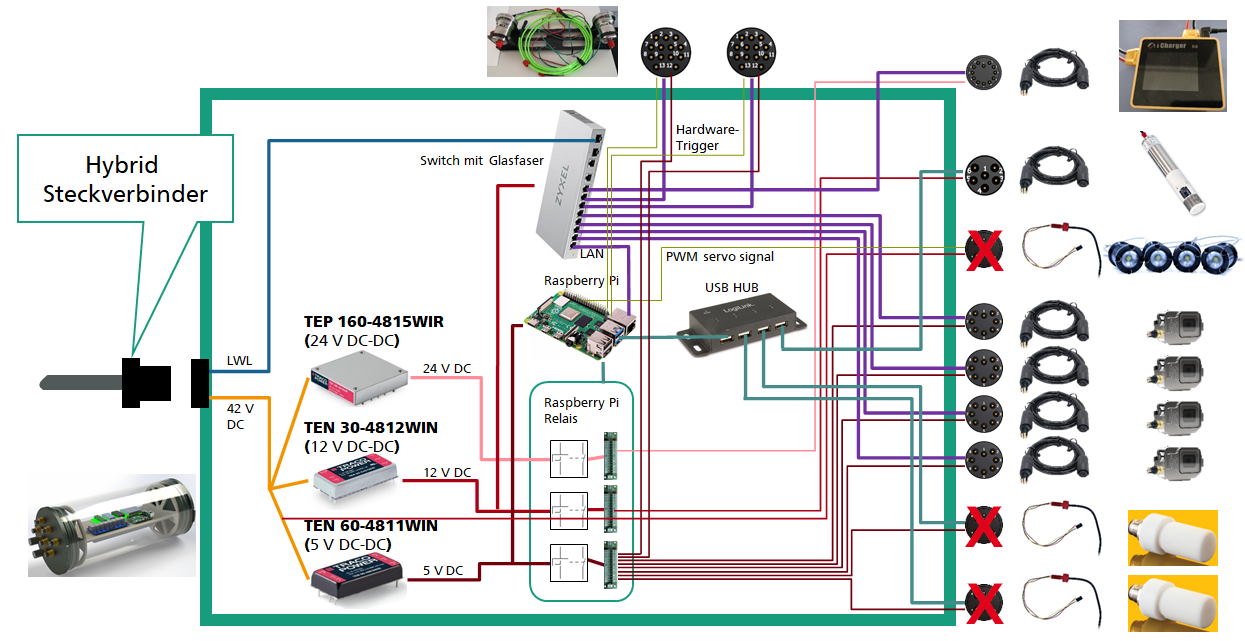
Mit Hilfe eines Multi-Sensor-Moduls können neben Druck, Temperatur und Leitfähigkeit auch pH-Wert, gelöster Sauerstoff, Wassertrübung und Chlorophyll gemessen werden. Eine Erweiterung des Moduls auf Nitrat/Ammonium-, Chlorid-, Bromid- und Kohlendioxidwerte ist möglich. Bis zu 9 Parameter sind hiermit gleichzeitig messbar. Zusätzlich wurden Sensoren zur Erfassung von UVA und UVB Strahlung im MiniLab integriert, um Aussagen zur Materialzerfallstests zu verifizieren. Für visuelle Kontrollen und Dokumentationen stehen 4 Unterwasserkameras und ein dimmbares Beleuchtungssystem zur Verfügung, die frei im MiniLab platziert und ausgerichtet werden können. Alle Sensoren sind an einer zentralen Unterwasserbox angeschlossen, die Stromversorgungen von 5V, 12V, 24V und 42V (Gleichstrom) zur Verfügung stellt, über einen integrierten Computer alle Komponenten in einem MiniLab-Netzwerk verbindet und über ein Relaisboard einzelne Komponenten ein- und ausschalten kann. Zusätzlich stehen Anschlüsse für ein Stereokamerasystem des Fraunhofer IOSB und ein Batterietestsystem des Fraunhofer IKTS für zukünftige Tests zur Verfügung. Die Steuerung der Sensoren wird über das Robot Operating System (ROS) realisiert und sichert die Kommunikation zu anderen ROS-basierten Systemen.
Die Unterwasserbox ist über ein hybrides, wasserdichtes und kevlarverstärktes Unterwasserkabel aus Polyurethan mit einer Überwasserstation verbunden. 6 Kupferkabel übertagen den Strom von der Überwasserstation zur Unterwasserbox. Die Kommunikation läuft hingegen über zwei Glasfaserleitungen, um eine maximale Bandbreite zu gewährleisten. Die Überwasserstation besteht aus einem Koffersystem mit einem Stromkonverter, der 220V Wechselstrom in 42V Gleichstrom transformiert und einem Switch, an den sich bis zu 8 weitere Computer über LAN anschließen lassen, die automatisch über einen DHCP-Server ins MiniLab-Netzwerk integriert werden. Die gemessenen Daten können ins Netz übertagen oder z.B. für längere Einsätze lokal gespeichert werden.
Gehalten werden die Unterwasserkomponenten durch einen Rahmen aus Edelstahl (1.4404) mit einer Kantenlänge von 68 x 68 cm und einer Höhe von ca. 65 cm. Im unteren Deck sind die Unterwasserbox und das Multi-Sensor-Modul platziert. Das obere Deck steht für externe Experimente zur Verfügung. Der Rahmen ist teilbar und erweiterbar. Über ein Fußblech wird das Einsinken des Rahmens beim Absetzen auf den Gewässergrund minimiert.
Zukünftig soll ein funkbasiertes Kommunikationssystem integriert werden, um auch Tests auf offener See durchführen zu können.


